
近年來,隨著人們對環境問題的日益重視,電動汽車將逐漸取代燃油機汽車,成為人們最普遍的交通出行工具。電機驅動器作為電動汽車三大核心之一,其逐漸向著高能效、高功率密度、高可靠性的方向發展,逆變器中傳統的硅基(Si)功率器件由于其本身材料特性的限制,已經越來越難以滿足新型電動汽車電機驅動器的需求。碳化硅(SiC)功率器件因為其耐高壓、耐高溫、低損耗的特性可以有效替代硅基功率器件,將其應用于電動汽車的電機驅動器中能夠明顯提高控制器的功率密度, 降低控制器的體積,達到小型化、輕量化的要求。然而SiCMOSFET應用在電機控制系統會出現難以避免的橋臂串擾、共模干擾等問題,影響控制系統的可靠工作。因此分析和研究SiC器件在永磁同步電機控制系統應用中的關鍵問題對電機驅動器的發展尤為重要。


SiC控制器研究現狀
SiC控制器能夠工作在更快的開關頻率和更快的開關速度,但是SiC器件對電力電子系統帶來的負面影響之一是會導致較為嚴重的橋臂串擾現象,情況惡時可能會導致電路直通、燒毀器件,嚴重影響控制性能。國內外的眾多專家學者對SiC器件在高頻高壓下產生的高頻振蕩及其寄生參數對SiC MOSFET開關特性的影響做出了研究與改進。
南京航空航天大學秦海鴻教授團隊分別研究了寄生電容與寄生電感對SiC MOSFET器件開關過程的影響得出結論:寄生電容參數主要對開通關斷時間及其能量損耗影響較大,寄生電感參數則對開關過程中波形振蕩及電壓尖峰的影響較大,為后續設計SiC MOSFET驅動電路做出了理論指導。
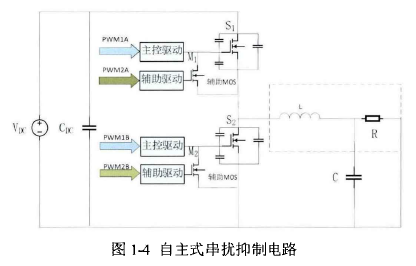
中國運載火箭研究所分析了SiC MOSFET單相橋式電路中橋臂串擾問題的原理,然后討論了空間矢量脈寬調制(SVPWM)算法對三相永磁同步電機驅動器相間串擾問題的影響,并設計了增加了輔助驅動的自主式串擾抑制電路,如圖1-4所示,實驗證明可以有效抑制三相橋式電路上下橋臂串擾,但每一相電路中都增加了兩路控制信號,無疑增加DSP控制算法的復雜性,降低計算速度。
北京交通大學提出了一種低柵極關斷阻抗驅動器來抑制橋臂間的串擾,在該驅動器中增加兩個額外的電容來產生低關斷柵極阻抗。該驅動器可實現共源寄生電感與門極回路的解耦, 并可旁路柵漏電容的位移電流。由于柵極驅動電路中引入了電容, 能夠引起更加劇烈的柵源極之間的電壓振蕩。
中國礦業大學通過數學建模分析了漏源電壓寄生電感對橋臂串擾與電壓震蕩的影響,提出了PPCAC門極驅動方案并用電機負載實驗驗證了該方案的有效性。該電路在原有驅動電路基礎上增加輔助推挽電路,每一相電路中均增加4個功率器件,增加了驅動電路的損耗,可能會使發熱加劇。
逆變器調制策略研究現狀
目前在永磁同步電機控制系統中,SVPWM是現在逆變器控制的研究熱點,是逆變器控制中使用最普遍的調制策略,其主要思想為采用逆變器空間電壓矢量的切換已獲得準圓形旋轉磁場,從而在開關頻率不高的情況下,在定子線圈中產生三相互差120°電角度、失真度較小的正弦電流波形。
然而,SVPWM制策略下的電機控制系統會產生高頻共模電壓,共模電壓耦合所產生的共模電流不僅是導致電機損壞的重要因素之一,而且共模電壓通過寄生電容與雜散電感的耦合與機殼、大地等形成回路,能夠產生高頻漏電流,此髙頻漏電流所帶來的傳導干擾是電機控制系統電磁干擾(EMI)的重要來源。有文獻指出由于SiC MOSFET工作在20KHz以上的高頻領域,基于SiC功率器件的電機控制系統的電磁干擾比采用硅基功率器件的控制系統更為嚴重。
共模電壓的抑制方法主要有無源抑制和有源抑制兩種方式。無源抑制方法是通過增加硬件的方式,設計無源濾波器件來抑制共模電流,這樣無可避免會增加控制器的體積,增加損耗,降低控制器的功率密度。有源抑制方式則是通過軟件的方式,改變逆變器的調制策略,減少零矢量的作用時間來抑制共模電壓。通過根據共模電壓產生的原理,目前常用的抑制共模電壓調制策略有RSPWM(Remote-State PWM)、AZSPWM1、AZSPWM3、NSPWM等幾種不同的逆變器調制策略。根據文獻分析,RSPW調制策略直流電壓利用率較低,工程上并不經常采用;RSPW只在高調制區域內有效,低調制區不起作用,AZPWM1與AZPWM3輸出電壓諧波較高。有文獻提出了一種不對稱無零矢量脈寬調制方法(NZPWM),考慮了死區效應,抑制了死區發生時的共模電壓尖峰。有文獻提出了一TSPWM調制策略,將調制區域分為高調制區與低調制區,分別引入不同的無零矢量脈寬調制策略,提高了調制范圍。也有從減少開關損耗和降共模電壓的角度入手,提出了一種旋轉三態脈寬調制(RTSPWM)技術,在開關頻率為100kHz的情況下進行小樣機實驗驗證了RTSPWM調制技術在性能上的優越性。有文獻提出了一種針對于碳化硅三相逆變器的新型脈寬矢量調制策略,它可以根據負載的功率因數而發生變化,改變調制算法的調制脈寬。
SiC MOSFET橋臂串擾理論分析
功率器件的橋臂串擾現象是指在橋式電路中,同一橋臂的其中一個器件的開通關斷過程會對另外一個器件的柵源極驅動電壓產生影響。對SiC MOSFET的轉移特性曲線的分析中,我們己經了解到SiC MOSFET的正向驅動電壓閾值為2V左右。器件在實際應用過程中,往往存在某些特殊環境,其閾值電壓甚至低于1.8V。SiC MOSFET有著較低的閾值電壓,卻擁有更快的開關速度,極高的dVGS/dt沿很容易導致器件的誤導通,出現橋臂直通現象,致使系統短路、器件損壞。同時SiC MOSFET的負向最大承受電壓也遠低于Si器件,為了防止器件發生擊穿,我們不僅需要注意正向串擾電壓,也要抑制負向串擾電壓。
橋臂串擾抑制措施
為了抑制橋臂串擾現象給器件帶來的負面影響,在橋式電路中使用SiC MOSFET時,需要增加串擾抑制措施。目前工程常用串擾抑制措施主要有以下三種:
(1)增大柵極驅動電阻。由析可得,柵極驅動電阻越大,電壓、電流波形越平緩,這種方式主要是通過降低dv/dt出來降低串擾尖峰,同時具有抑制振蕩的效果。但增大驅動電阻也會降低器件的開關速度,增加器件的開關損耗,這種做法會降低SiC MOSFET的優勢性能,并不適合。
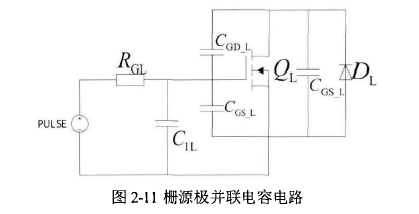
(2)增大柵源極并聯電容,如圖2-11所示。由公式(2-7)與公式(2-8)分析可知,無論是正向最大串擾電壓還是負向最大串擾電壓,其絕對值均與器件柵源并聯電容成反比,因此增大柵源并聯電容可以有效降低正、負向橋臂間串擾尖峰。但由于CGS會與器件以及電路中的寄生電感作用,CGS增大會使開通時間拉長,并增加開通關斷能量損耗。
(3)負壓關斷。使用負向驅動電壓來拉低正向串擾電壓尖峰,防止發生橋臂直通事故。然而SiC MOSFET的負向閾值電壓不超過-10V,使用負壓關斷并不能抑制負向串擾電壓尖峰,器件則有可能在因超出負向耐壓而被擊穿。同寸,負壓關斷對于串擾尖峰的抑制效果有限,并不能只靠負壓關斷來抑制橋臂串擾。
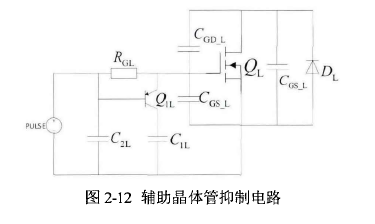
除了以上三種方式經常被工程采用之外,研究人員也對密勒鉗位抑制電路進行了研究分析。如圖2-12所示電路通過輔助晶體管串聯電容的方式抑制橋臂正向串擾,同時不降低開關速度,但此電路只考慮了正向串擾,卻并不能抑制負向串擾。此外還有采用輔助MOS管并聯電容的方式,但這種方式則會增加電路控制復雜度,降低DSP運行速度。此外目前驅動芯片也帶有鉗位抑制電壓接口,但所針對串擾電壓為2V之內,若串擾電壓超過2V,鉗位電路失效,因此,仍然需要與串擾抑制電路相結合。
新型串擾抑制電路
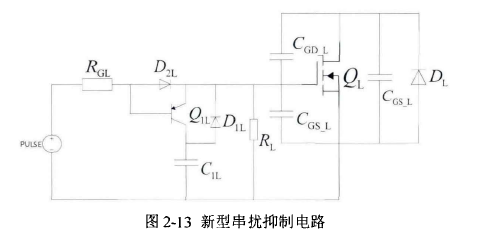
新型串擾抑制電路綜合對橋臂串擾原理的分析,山東大學宗莎莎在碩士論文“基于SiC逆變器的電動汽車永磁同步電機控制系統研究”中在以上串擾抑制措施的基礎上進行了改進,設計了如圖2-13所示的新型串擾抑制電路(以下橋臂為例)。
永磁同步電機結構及分類
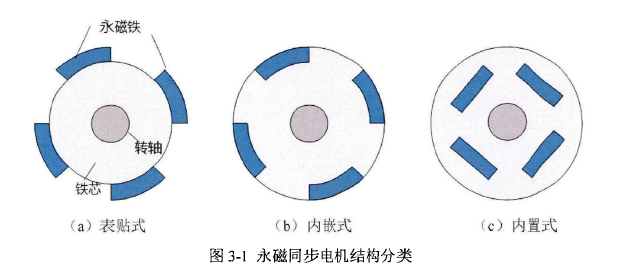
相比于異步電機,永磁同步電機具有體積小、效率高、質量輕的特點,其動態響應能力較好,適合于高轉矩、高負載的應用場景,因此在大功率新能源汽車中使用較為廣泛。永磁同步電機的重要組成部分為定子和轉子,定子部分由定子鐵芯、三相交流繞組及機座構成,產生圓形旋轉磁場, 轉子部分由轉子鐵芯、永磁體及轉軸三部分構成,在旋轉磁場中被磁力線切割進而產生(輸出)電流。根據轉子永磁體在電機中放置位置的不同,永磁同步電機可以分為表貼式、嵌入式及內置式三種結構,如圖3-1所示。
圖3-1(a)所示為表貼式永磁同步電機轉子示意圖,其結構簡單,磁路對稱,永磁鐵直接貼附在轉子鐵芯的表面,制造成本低廉。但是表貼式電機旋轉過程無磁阻轉矩,無法實現功率密度的提高,在高速汽車中較少應用。圖3-1(b)表面內嵌式及(c)內置式轉子結構均為凸極式永磁同步電機,交、直軸磁路不對稱,能夠產生磁阻轉矩實現弱磁擴速,新型電動汽車中使用內置式永磁同步電機較多,山東大學宗莎莎的碩士論文“基于SiC逆變器的電動汽車永磁同步電機控制系統研究”同樣采用內置式永磁同步電機。
永磁同步電機控制策略與共模抑制
山東大學宗莎莎的碩士論文“基于SiC逆變器的電動汽車永磁同步電機控制系統研究”對永磁同步電機控制系統進行了綜合研究。討論了永磁同步電機的結構并對永磁同步電機在三相坐標下及旋轉坐標下的數學模型進行了分析。針對旋轉坐標下電機的數學模型,選擇了矢量控制方式,分析了幾種不同的控制策略,并重點對MTPA及弱磁控制方式進行了分析。建立了電機在不同運行區間內的控制策略數學模型,選擇直接弱磁法對電機定子電流進行計算。對直接弱磁控制的控制算法流程進行了詳盡的分析,參考所建立數學模型在仿真實驗平臺上搭建了整個控制系統的仿真模型,并在電機基速及弱磁擴速區對電機的轉速、轉矩、定子電流進行了分析, 驗證了控制算法的有效性及所搭建模型的正確性。較為詳細地分析了逆變器矢量調制策略的原理及實現,并針對現有抑制共模電壓的矢量調制策略無法提高直流電源利用率的問題,TSPWM做出了優化與改進:設計了TSPWM的過調制策略,主要運用電壓重構的思想;對于TSPWM策略中低調制區域因死區帶來的電流畸變問題進行了死區補償,改善了電流波形。在Matlab/Simulink中搭建了矢量調制模型,仿真實驗證明了改進型TSPWM調制策略的有效性。
電機控制系統硬件平臺及軟件平臺的設計
硬件部分對電機控制系統的主控電路板、驅動板及功率板進行了設計,主控芯片采用了TI公司的32位DSP芯片TMS320F28335PGFA,轉子角度通過旋轉變壓器經解碼芯片獲得。驅動芯片采用SiC MOSFET專用芯片ADuM4135,并設計了去飽和檢測電路。軟件部分主要對主程序及主中斷程序流程進行了介紹,對逆變器調制部分程序進行了流程說明。最后對新型串擾抑制電路及改進型逆變器調制策略進行了實驗驗證。
未來工作展望
山東大學宗莎莎的碩士論文“基于SiC逆變器的電動汽車永磁同步電機控制系統研究”對SiC MOSFET器件驅動特性進行了研究分析,并對基于SiC逆變器的永磁同步電機控制系統調制策略進行了深入研究,由于各方面原因,文章仍存在許多未解決問題需要進一步完善研究:
(1)論文對影響SiC MOSFET開關特性的研究較為淺層,僅對驅動電阻進行了分析,特性分析比較簡單基礎。對于更加深入細致的問題,如寄生電感及電容對器件電壓振蕩及串擾等現象的影響,在減少寄生電感的電磁兼容方面后續還需進一步深入研究。
(2)直接弱磁法對電機參數要求較高,然而電動汽車運行的工況中,受溫度、壓力等環境參數的影響,電機的參數會發生變化,這涉及電機控制中自適應算法的研究,這是未來研究方向之一。
(3)論文只針對有源抑制共模電壓方式進行了研究,并未結合無源EMI濾波器對共模電壓產生的電磁干擾進行分析,有待后續深入研究。
參考文獻:宗莎莎,基于SiC逆變器的電動汽車永磁同步電機控制系統研究【D】,山東大學,2021

